地图
保研
数学建模
matlab入门案例
html5期末大作业
静态
心理健康管理系统
python学习资料
Fabric
redis安装
类模板
C++11
OpenHarmony
gitee
汇编求解一元二次方程的解
泰勒展开式
pwn
Linux基础
解析
逆波兰表达式
LQR
2024/4/11 23:39:22![[现代控制理论]7_线性控制器设计_Linear Controller Design](https://img-blog.csdnimg.cn/b0a5939e43314e868cafd6edee41ce0f.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA546L5bSH5Y2r,size_20,color_FFFFFF,t_70,g_se,x_16)
[现代控制理论]7_线性控制器设计_Linear Controller Design
[现代控制理论]11_现代控制理论串讲_完结_pdf获取 [现代控制理论]10_可观测性与分离原理_观测器与控制器 [现代控制理论]9_状态观测器设计_龙伯格观测器 [现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink [现代控制理论]8_LQR控制器_simulink [现代控制理论]7_线性控制器设计…
![[现代控制理论]8_LQR控制器_simulink](https://img-blog.csdnimg.cn/6bbb4ef49fd840f897d75dbc32c5f869.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA546L5bSH5Y2r,size_20,color_FFFFFF,t_70,g_se,x_16)
[现代控制理论]8_LQR控制器_simulink
[现代控制理论]11_现代控制理论串讲_完结_pdf获取 [现代控制理论]10_可观测性与分离原理_观测器与控制器 [现代控制理论]9_状态观测器设计_龙伯格观测器 [现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink [现代控制理论]8_LQR控制器_simulink [现代控制理论]7_线性控制器设计…
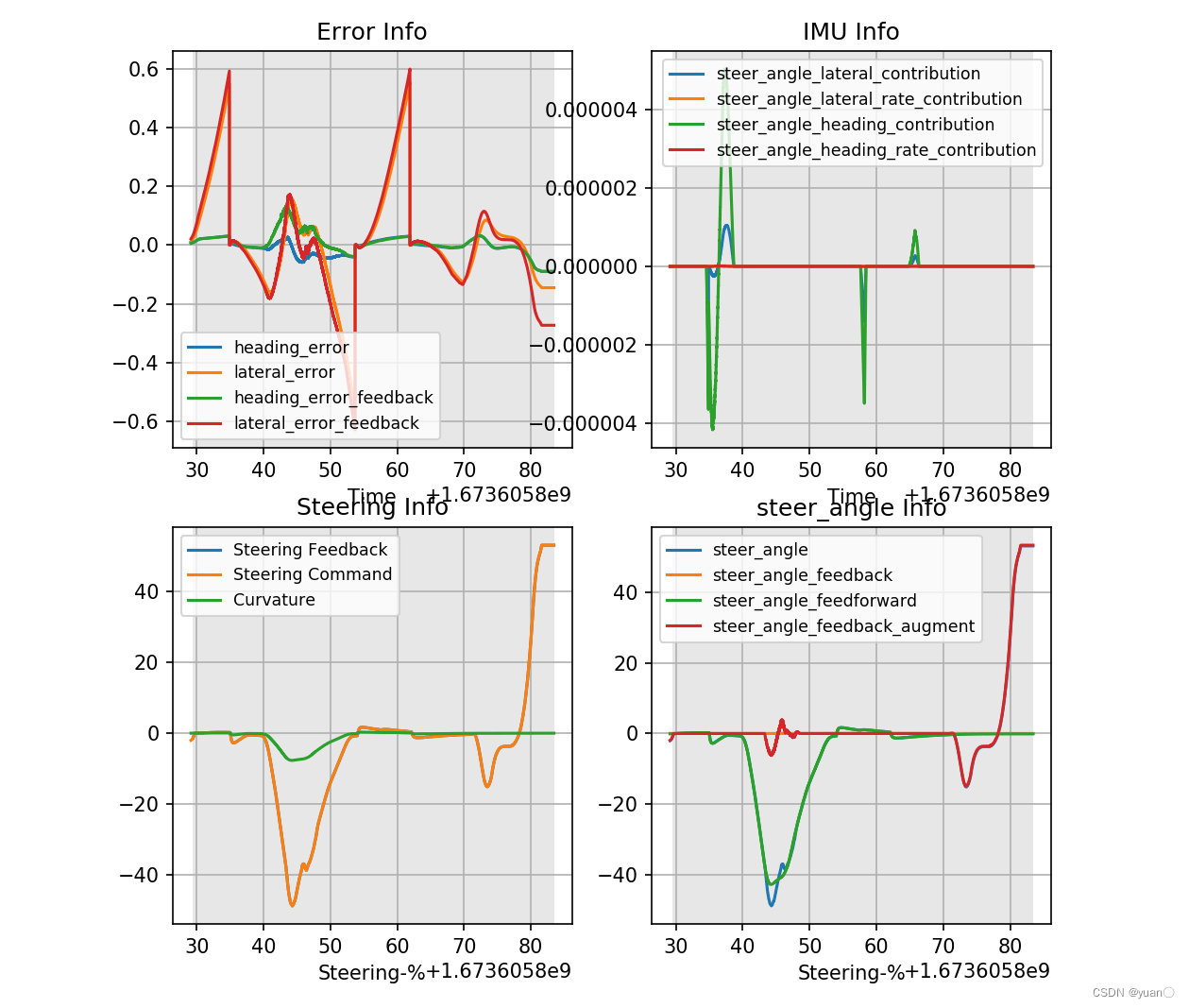
Apollo星火计划学习笔记——Control 专项讲解(LQR)
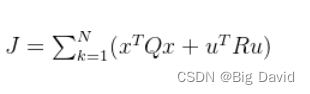
文章目录1. 算法相关基础1.1 一阶倒立摆1.2 二自由度车辆横向跟踪偏差模型1.3 车辆横向跟踪偏差模型1.4 车辆横向跟踪偏差倒车模型1.5 轮胎侧偏角与侧偏刚度1.6 LQR 线性二次型问题:2. LQR代码解析2.1 WriteHeaders(调试过程中的状态量)2.2 LatControlle…
无人驾驶LQR控制算法 c++ 实现
参考博客: (1)LQR的理解与运用 第一期——理解篇 (2)线性二次型调节器(LQR)原理详解 (3)LQR控制基本原理(包括Riccati方程具体推导过程) (4)【基础…
![[现代控制理论]11_现代控制理论串讲_完结_pdf获取](https://img-blog.csdnimg.cn/5712971bd40f451fb22fcf46a92a84ae.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA546L5bSH5Y2r,size_20,color_FFFFFF,t_70,g_se,x_16)
[现代控制理论]11_现代控制理论串讲_完结_pdf获取
DR_CAN的现代控制理论的笔记就结束了,加上这篇一共11篇。
[现代控制理论]11_现代控制理论串讲_完结_pdf获取 [现代控制理论]10_可观测性与分离原理_观测器与控制器 [现代控制理论]9_状态观测器设计_龙伯格观测器 [现代控制理论]8.5_线性控制器设计_轨迹跟踪simulin…

自动驾驶学习笔记(九)——车辆控制
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
控制器设计
比例积分微分控制
线性…
MATLAB - 比较 DDPG Agent 和 LQR 控制器
系列文章目录 前言
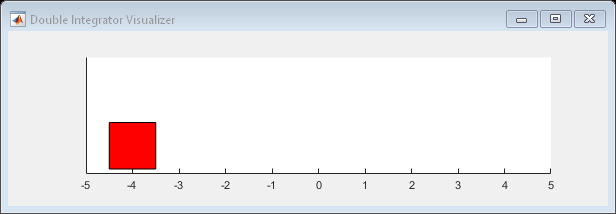
本示例展示了如何训练深度确定性策略梯度(DDPG)Agent,以控制 MATLAB 中建模的二阶线性动态系统。该示例还将 DDPG Agent 与 LQR 控制器进行了比较。
有关 DDPG 代理的更多信息,请参阅深度确定性策略梯度 (DDP…
MATLAB - 控制小车上的倒立摆
系列文章目录 前言 一、小车 - 摆杆
小车 - 摆杆模型如图 1 所示,使用 Simscape™ Multibody™ 在 Simulink 中建模。 图 1:小车上的倒立摆 图 2:Simscape 多体模型 该系统通过对小车施加可变力 进行控制。控制器需要在将小车移动到新位置或…