spark-ml
物联网
爬虫
设计模式
sqoop
孤立点
IO
负载均衡
xshell
诗歌
conda
图像分割
游戏策划
ACK
系统架构设计案例分析常考知识点
tornado
移动端
自动控制考研
gns3
Cancel
最优控制
2024/4/12 20:00:43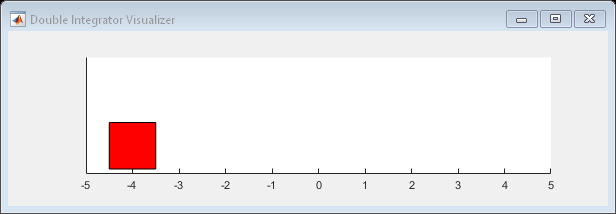
MATLAB - 比较 DDPG Agent 和 LQR 控制器
系列文章目录 前言
本示例展示了如何训练深度确定性策略梯度(DDPG)Agent,以控制 MATLAB 中建模的二阶线性动态系统。该示例还将 DDPG Agent 与 LQR 控制器进行了比较。
有关 DDPG 代理的更多信息,请参阅深度确定性策略梯度 (DDP…

最优控制 3:最优控制理论中的极小值原理与动态规划
最优控制 3:使用极小值原理求解最优控制问题引言极小值原理tft_ftf 固定的情况tft_ftf 自由的情况动态规划连续系统 HJB 方程的推导引言
经典变分法是一种特别强大的工具,但是它要求控制量必须可导且无界,这在很多问题中都是不成立的。着…
OCS2 入门教程(五)- 从 URDF 到 OCP、配置求解器、MPC - Net
系列文章目录 前言
阻碍 MPC 在机器人任务中广泛应用的主要挑战之一是设置最优控制问题的负担。OCS2 提供了多个辅助类,用于定义一些常用模型、成本和约束条件,以减轻这一问题。为此,OCS2 提供了多个第三方软件包接口,如 RobCoGe…
Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录 前言 我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定…
MATLAB - 最优控制(Optimal Control)
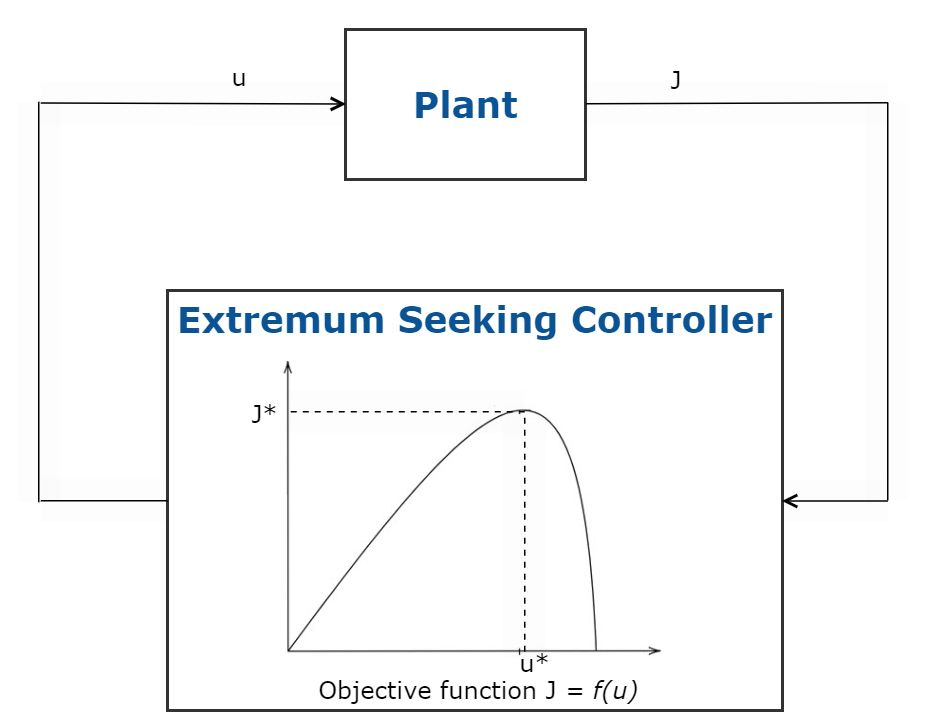
系列文章目录 前言 - 什么是最优控制? 最优控制是动态系统满足设计目标的条件。最优控制是通过执行以下定义的最优性标准的控制律来实现的。一些广泛使用的最优控制方法有: 线性二次调节器 (LQR)/线性二次高斯 (LQG) 控制 模型预测控制 强化学习 极值…
MATLAB - 凸优化(Convex Optimization)
系列文章目录 前言 凸优化(Convex optimization)是在凸约束(convex constraints)条件下使凸目标函数(convex objective function)最小化的过程,或者等同于在凸约束条件下使凹目标函数最大化的过…
CasADi - 最优控制开源 Python/MATLAB 库
系列文章目录 文章目录 系列文章目录前言一、介绍1.1 CasADi 是什么?1.2 帮助与支持1.3 引用 CasADi1.4 阅读本文档 二、获取与安装三、符号框架3.1 符号 SX3.1.1 关于命名空间的说明3.1.2 C 用户注意事项 3.2 DM3.3 符号 MX3.4 SX 和 MX 混合使用3.5 稀疏类3.5.1 获…
MATLAB - 利用非线性模型预测控制(Nonlinear MPC)来控制四旋翼飞行器
系列文章目录 前言
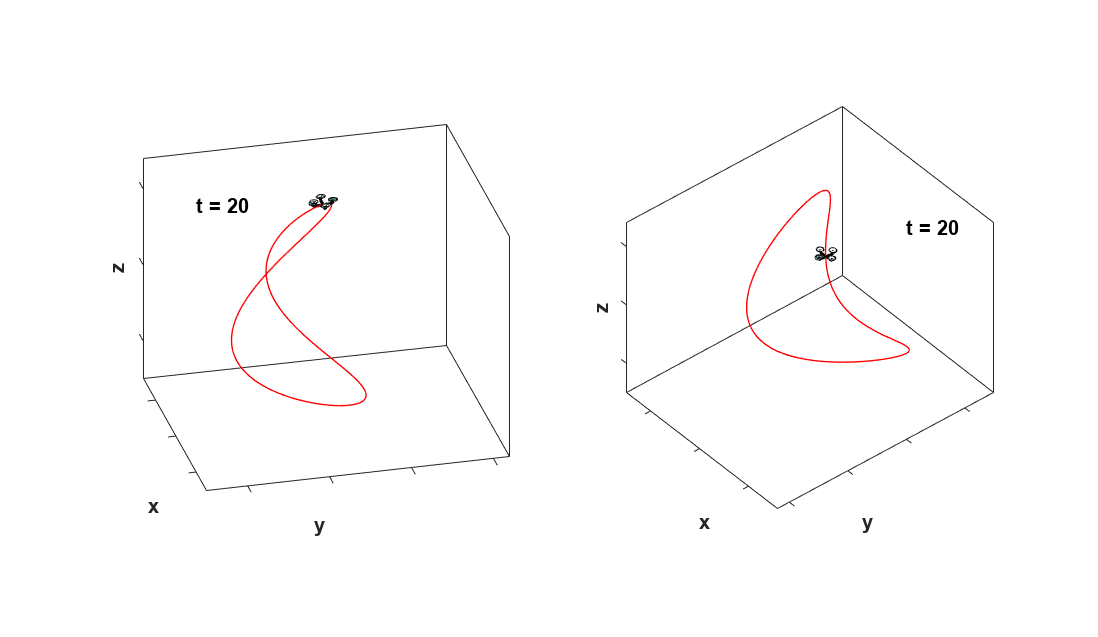
本示例展示了如何利用非线性模型预测控制(MPC)为四旋翼飞行器设计一个跟踪轨迹的控制器。 一、四旋翼模型
四旋翼飞行器有四个向上的旋翼。从四旋翼飞行器的质量中心出发,旋翼呈等距离的正方形排列。四旋翼飞行器动力学数…
最优控制理论笔记 - 01数学准备
目录
一、向量和矩阵的微分
1. 向量对标量的导数 2. 矩阵对标量的导数
2.1 矩阵对标量的导数的运算公式
2.2 标量函数对向量的导数:
2.3 向量函数对向量的导数
二、函数极值的问题
三、有约束条件的函数极值问题
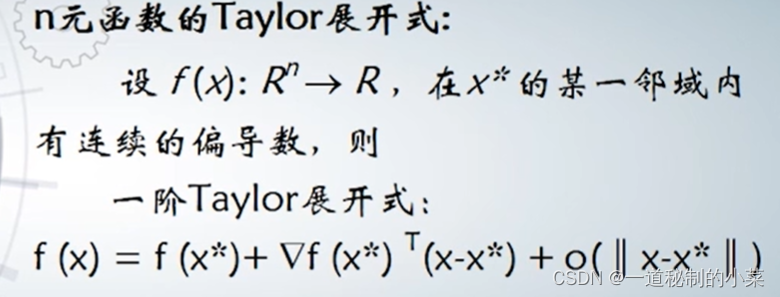
四、n元函数的Taylor 一、向量和矩阵的微分 …

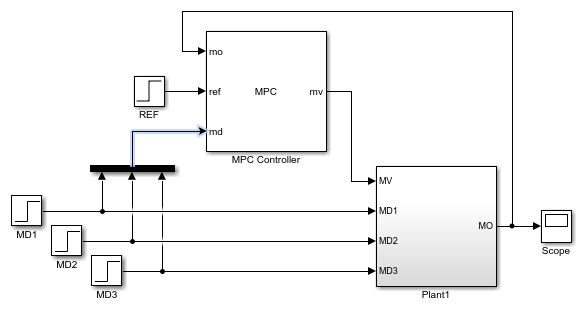
MPC模型预测控制器学习笔记(附程序)
本文用于记录学习DR_CAN老师发布的MPC系列视频教程的相关内容,文章中放的源码也是DR_CAN老师提供的程序示例,链接如下: DR_CAN老师的视频教程链接(点击可跳转) DR_CAN老师提供的程序示例(点击可跳转&#x…
机器人控制的开源优化库 Model-based Optimization for Robotics - Optimization Tools
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD 前言
开源的库和工具箱 一、开源的库和工具箱 …
MATLAB - 使用 MPC Designer 线性化 Simulink 模型
系列文章目录 前言
本主题介绍如何使用 MPC Designer 对 Simulink 模型进行线性化。为此,请从包含 MPC 控制器块的 Simulink 模型打开该应用程序。本例中使用 CSTR_ClosedLoop 模型。
open_system(CSTR_ClosedLoop) 在模型窗口中,双击 MPC 控制器模块。…
自动驾驶车辆运动规划方法综述 - 论文阅读
本文旨在对自己的研究方向做一些记录,方便日后自己回顾。论文里面有关其他方向的讲解读者自行阅读。 参考论文:自动驾驶车辆运动规划方法综述
1 摘要
规划决策模块中的运动规划环节负责生成车辆的局部运动轨迹 ,决定车辆行驶质量的决定因素…
OCS2 入门教程(三)- 最优控制模块
系列文章目录 前言 在本页中,我们将为您提供如何定义 MPC 问题的一些提示。在 OCS2 中,OptimalControlProblem 结构定义了优化问题的主要组成部分,即动力学、成本和约束条件。 除此之外,您可能还希望为 MPC 提供一些参考轨迹、预定…
IEEE RAS 机器人最优控制(Model-based Optimization for Robotics)学习资料
系列文章目录 前言
电气和电子工程师学会机器人模型优化技术委员会 一、学习资料
1.1 教程和暑期学校
2020 年 Memmo 欧盟项目暑期班2019年Memmo欧盟项目冬季学校Matthias Gerdts(德国慕尼黑联邦国防军大学)在拜罗伊特 OMPC 2013 上举办的最优控制教程…
Pinocchio - 开源多刚体动力学 C++、Python库
系列文章目录 前言
Pinocchio 是一个用于动态计算的 C 库,侧重于机器人、计算机动画和生物力学应用。 它基于 Featherstone 在其著作中正式提出的动态多体计算。 该软件附带一个 python 封装和可视化工具。 一、库特征
实现了以下算法
递归牛顿-欧拉算法…
实时最优控制(Real-Time Optimal Control)工具
系列文章目录 前言
许多现代控制方法,如模型预测控制(model-predictive control),在很大程度上依赖于实时解决优化问题。特别是,高效解决优化控制问题的能力使复杂机器人系统在实现高动态行为(highly dyna…